Many companies are developing human robots, some of which can communicate with people, some can travel through the snow, and some can open windows and operate the drill.
To make a real robot and make it indistinguishable from people, we can't do it now. However, it doesn't mean we haven't tried it. Today we will introduce 10 robots from which we can see the future. To create the perfect humanoid robot, it must have three characteristics: appearance, movement and movement should be similar to people. There are currently no robots that can be truly implemented, and perfect humanoid robots have to wait for decades to appear.
PETMAN
Developed by Boston Dynamics, the PETMAN robot is a super-real humanoid robot designed to test protective clothing. Developers have sensors on PETMAN's artificial skin that detect chemicals, and high-tech skins mimic human biometrics such as creating sweat and regulating temperature. In the end, human rescue workers will wear protective clothing, so researchers use PETMAN to simulate the real environment. Unlike the previous version, the new PETMAN is more advanced, more balanced, free to move, and can walk and bend.

Junko Chihira
Toshiba developed the Junko Chihira robot, which is not the same as PETMAN and other robots. Junko Chihira is not very agile, but has a strong interactive ability to simulate human facial expressions. A Junko Chihira robot is installed at the Tourist Information Center on the Tokyo Beach. It can welcome visitors in Japanese, English and Chinese. Junko Chihira embeds Toshiba speech synthesis technology and can speak three languages. Later in the year, robots will also incorporate speech recognition technology so that the robot can answer questions from visitors. Communication with the robot is now only possible via the keyboard.

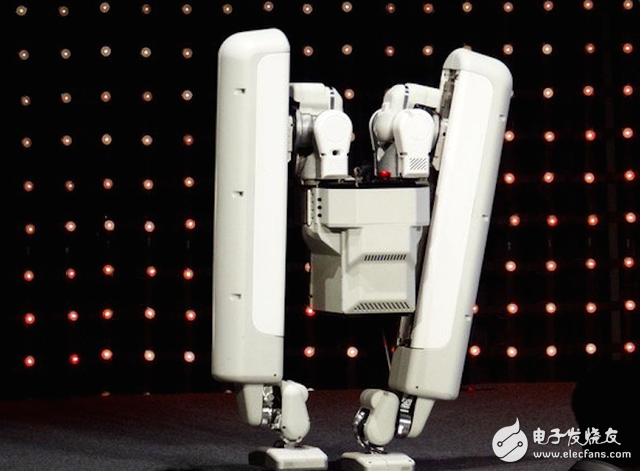
SCHAFT
In order to let the robot walk smoothly with both feet, the experts racked their brains. SCHAFT is a biped robot that has no torso. The existing SCHAFT can already accomplish some meaningful tasks, and in the future it may evolve into a more agile humanoid robot. In fact, SCHAFT is a Japanese robotic startup that was acquired by Google in 2014 and is now part of the Google Technology Lab. At the 2016 NEST show in Tokyo, we saw the SCHAFT robot. SCHAFT has low cost, low energy consumption and is very compact. It can carry 60 kg of materials, can walk in an uneven environment, and can climb stairs. If the torso and head are there, can the robot accomplish these tasks? do not know. From the demonstration, the robot does not have to have a torso.

Erica
The Erica robot was developed by Hiroshi Ishiguro, who is the head of the Intelligent Robotics Laboratory at Osaka University, Japan. In the field of ultra-real human robots, Shi Heihao is quite famous. He has developed the Geminoid HI-4 robot, which is very similar to people. Erica is not only similar in appearance, but also uses speech recognition technology, human tracking technology, and natural movements to interact with human partners.
The robot has 19 degrees of freedom. One degree of freedom means that the robot can perform a body movement, such as twisting the neck and raising the arm. Erica's face, neck, shoulders, and wrists can be moved. It can be vocalized with synthetic sounds to create several facial expressions.

Geminoid DK
The Geminoid DK robot was also developed by Shihei Hao. It was publicly displayed in 2011. The robot is very similar to the robot developed by Henrik Scharfe, a professor at Aalborg University in Denmark. The Geminoid DK was designed and manufactured for $200,000, and its facial expressions are close to real people.
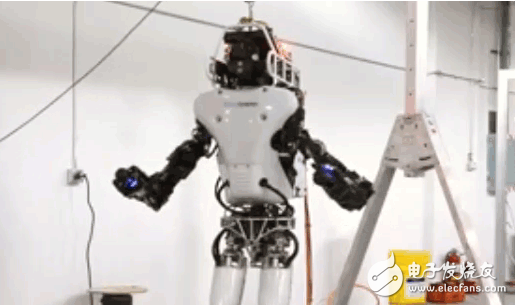
ATLAS Unplugged
Compared to the previous version, the new ATLAS Unplugged robot is energy efficient, strong, very sensitive, quiet, and we don't need to wear a safety rope on the new robot. The ATLAS Unplugged is 1.88 meters high and weighs 156.6 kilograms. It is equipped with a new battery pack - placed on the back. The robot has three sensing computers installed to plan tasks. The head is equipped with a wireless router that can communicate wirelessly. The robot also has a "kill switch" installed. In the future, ATLAS may be used on the battlefield and can also be a rescue robot.
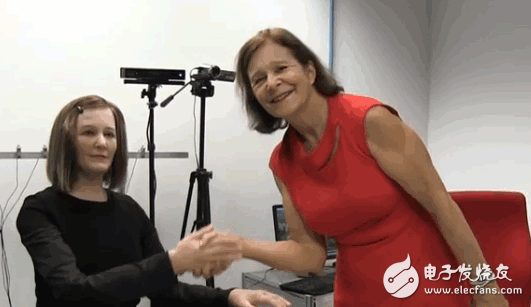
Nadine
Nadine was developed by Nanyang Technological University in Singapore. It is a social robot that integrates AI technology and has similar physical functions to people. During the conversation, Nadine uses natural gestures and moves the head. The mouth can move when speaking, but the movement is not perfect. When Nadine is happy, it smiles and looks directly at humans when talking. Nadine uses facial recognition software to remember the people she meets and even “remembers†the conversation. At the time of speaking, Nadine will feel happy or sad, and it has its own personality and expression. The software that drives Nadine runs similar to Siri and Cortana, and Nadine will eventually become a human assistant.

REEM-C
REEM-C is a prototype humanoid robot developed by PAL RoboTIcs of Spain. The robot is 1.65 meters high and weighs 80 kilograms. The REEM-C head has 2 degrees of freedom, a stereo camera is installed, the LED is used to represent the mouth, and the speaker is spoken. There are 7 degrees of freedom in the hand and 10 kg of things can be placed in the head. The hand is similar to the human hand, with three degrees of freedom, and a pressure sensor is installed to sense the touch. The REEM-C has 6 degrees of freedom and can move at speeds of up to 1.5 kilometers per hour. Overall, REEM-C has 22 degrees of freedom, quite good.
As for the brain, the REEM-C is equipped with an i7 computer running Ubuntu software. Sensor robots can travel through the environment, avoiding obstacles and people. Designers hope that REEM-C can become a servant or perform other tasks, such as becoming a tour guide, participating in a performance, or becoming a security guard. REEM-C is currently in the prototype stage, a bit cumbersome, but the function is a lot.
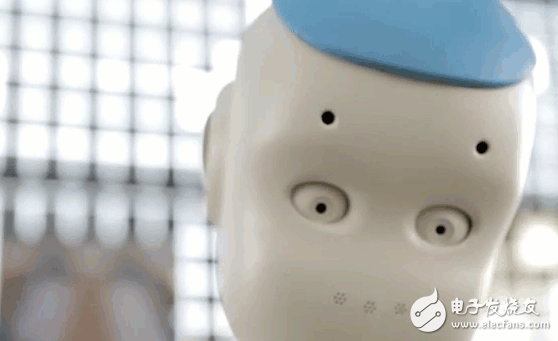
Romeo
The Romeo robot is 140 cm tall and was designed by Aldebaran RoboTIcs in France for use by individual users, such as the elderly. Romeo can open windows, climb stairs, and get things on the table. In the end, the researchers hope that Romeo can carry goods and even carry people.
Five research institutes, 13 robotics labs, 80 engineers and researchers participated in the research and development of Romeo. Among the robots listed today, Romeo is not the most realistic, but its limb movements are most human. Romeo's arm palm movement is close to perfect, because there is actually a real child inside the robot.

OceanOne
OceanOne is an underwater robot that can swim. The robot was developed by Stanford University's Artificial Intelligence Laboratory and installed a sensory palm that can be used to sense the navigator's control with tactile feedback. Why develop OceanOne? It is mainly used to study coral reefs in the Red Sea. If unmanned equipment is used under water, it may destroy the delicate seabed structure. OceanOne looks like a human, controlled by human motion, which analyzes coral reefs. In addition to studying coral reefs, OceanOne can do other work. For example, during the first mission, OceanOne sneaked into the sea floor of the French coast to look for property lost due to an accident, when the robot worked at a depth of about 100 meters. The robot finds a vase and sends it back to the deck of the vessel.
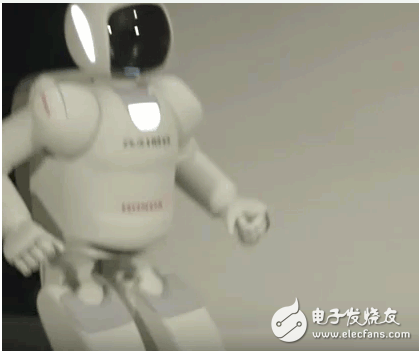
ASIMO
Honda has developed ASIMO, a humanoid robot. This year ASIMO is about to celebrate its 17th birthday and it has been improving. Compared with the previous version, the current ASIMO is lighter and smaller, and the movement is more elegant and more agile. It can pick up the beverage can filled with juice, open it, then take a cup, pour the drink into the cup, and place the cup and the beverage can on the table. Honda installed a sensor on the hand of the ASIMO robot. Through the sensor, the robot knows what it is holding and knows what its weight is.
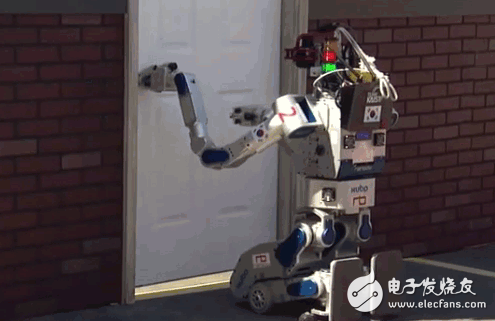
DRC-HUBO
Developed by KAIST Korea, DRC-HUBO was the champion of the 2015 DARPA Robotics Challenge, when DRC-HUBO defeated 22 competing robots and received a $2 million prize. The attraction of DRC-HUBO is not because it looks like humans, but because it has strong adaptability. We exclude DRC-HUBO from the list because it moves differently than humans. The DRC-HUBO has wheels mounted on the knees, and there are many problems that the two-legged robot cannot solve. The DRC-HUBO can. When participating in the competition, all eight tasks DRC-HUBO were completed, and the time spent was the shortest. For example, DRC-HUBO successfully opened the window and operated the drilling machine. Because the robot has wheels on its knees, it is not a real humanoid robot, but it still impresses us.
Displacement sensor, also known as linear sensor, is a linear device belonging to metal induction. The function of the sensor is to convert various measured physical quantities into electricity. In the production process, the measurement of displacement is generally divided into measuring the physical size and mechanical displacement. According to the different forms of the measured variable, the displacement sensor can be divided into two types: analog and digital. The analog type can be divided into two types: physical property type and structural type. Commonly used displacement sensors are mostly analog structures, including potentiometer-type displacement sensors, inductive displacement sensors, self-aligning machines, capacitive displacement sensors, eddy current displacement sensors, Hall-type displacement sensors, etc. An important advantage of the digital displacement sensor is that it is convenient to send the signal directly into the computer system. This kind of sensor is developing rapidly, and its application is increasingly widespread.
Magnetic Scale Sensor,Magnetic Length Scale,Magnetic Scale Device,Magnetic Scale Measurements
Changchun Guangxing Sensing Technology Co.LTD , https://www.gx-encoder.com