0 Preface
High-performance capacitive micro-mechanical accelerometer has been widely used in inertial navigation, GPS positioning, oil exploration and other fields [1-3]. In the high-precision sigma-delta (ΣΔ) accelerometer system, the accuracy of the mechanical meter can already be less than 2 μg, and the performance of the system is often restricted by the interface circuit at the later stage. In order to improve the accuracy of the interface circuit at the later stage, the quantization noise is often suppressed by increasing the order of the system. For example, a literature [7] reported a fifth-order ΣΔ accelerometer system by cascading a third order after the second-order sensitive structure. The modulator implements high-order shaping of quantization noise. Literature [8] also introduced a high-order closed-loop system, which improves the overall noise shaping capability by introducing multi-stage integrators. However, the high-order system will bring stability problems, which will bring no difficulty to the system design. In order to solve the stability problem of the system on the basis of ensuring the capability of noise shaping, the design method of the high-precision modulator can be used for reference, and the number of integrators in the latter stage can be reduced by using a multi-bit quantization method, so that the system noise can be ensured. Plasticity can reduce the system's stability risk.
Although multi-bit quantization technology can improve the shaping ability and improve the linearity of the interface circuit at the later stage, it also imposes high requirements on the electrostatic force feedback linearity of the sensitive structure. Therefore, it is necessary to linearize the electrostatic force feedback of the system to ensure that the multi-bit quantization technology can be successfully applied to a nonlinear micro-mechanical accelerometer system. In this paper, an electrostatic force feedback linearization circuit is applied, and a fourth-order multi-bit quantification micro-mechanical accelerometer system is proposed, which reduces the requirement for stability in system design and also improves the linearity of the system.
1 system design
Figure 1 is a multi-bit quantified micro-mechanical accelerometer system proposed in this paper, where Kx/V is the gain of the displacement of the mass of the sensitive structure of the micro-machined accelerometer to the voltage, and KV/a is the electrostatic force feedback factor, which represents the feedback voltage to etc. The feedback gain acceleration factor, a1, a2, and a3 are feedforward factors, fb is a local feedback factor, and k1 and k2 are integrator gain scaling factors. In order to improve system stability, a post-phase compensator HC(z) is introduced to provide phase compensation. After Simulink simulation, the system coefficients a1, a2, a3 are determined to be 0.7, 0.2, 0.1, k1 is 1/5, k2 is 1/4, fb is 0.2, and the post-phase compensator compensation factor is 0.8.
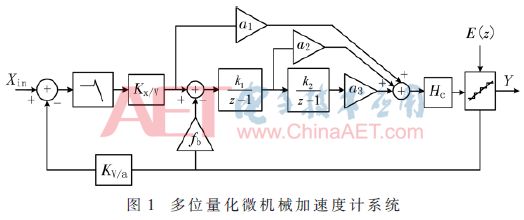
In Figure 1, Kx/V and KV/a can be expressed as:


In the above formula, Cf is the integral capacitance of the pre-stage charge amplifier, d0 is the comb-tooth spacing of the sensitive structure, C0 is the static capacitance of the sensitive structure, Vr is the reference voltage (usually half of the power supply voltage), m is the quality of the mass, and Vfb is Feedback voltage.
2 circuit implementation
Figure 2 is the pre-stage circuit of the differential charge amplifier, including the sensitive amplifier and the sample-and-hold circuit. The reference capacitor CR and the equivalent capacitor CS of the sensor form a full-bridge balanced structure with an equivalent capacitance of 20 pF. The integrated capacitance of the sensitive amplification section is 10 pF. A smaller integrated capacitor can increase the loop gain and reduce the equivalent input noise, but it will reduce the loop stability. Because the acceleration causes the change of the mass caused by the displacement of the mass, it is amplified by the sensitive amplifier part, and the correlated double sampling circuit can eliminate low-frequency noise and op-amp misalignment [9]. Sensitive amplification part of the op amp is a fully differential single-level folded cascode structure, the circuit is simple and easy to implement. The op amp has a DC gain of 75 dB and a bandwidth of 15 MHz. Common-mode feedback uses a switched-capacitor structure to reduce system power consumption. The latter integrator also adopts a similar operational amplifier structure, but since the load capacitance becomes smaller, the power consumption of the op amp can be reduced.

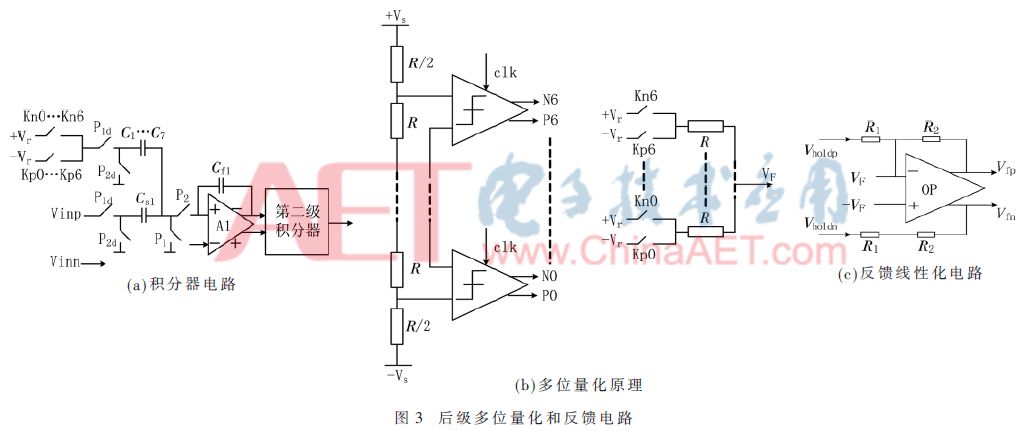
The post-stage multi-bit quantization and feedback circuit is shown in Figure 3. In Figure 3(a), the first-stage integrator sampling capacitance is 1 pF, the integrated capacitance is 5 pF, the second-stage integrator sampling capacitance is 0.5 pF, and the integrated capacitance is 2 pF, which can reduce the op amp load. In the case of the same bandwidth, it can effectively reduce the power consumption of the op amp. The phase compensator uses the passive filter structure in [10], which is insensitive to parasitics and low power consumption. The feedback path switches kN, KP of the first-stage integrator are controlled by the output of a Data Weighted Averaging (DWA) module. The DWA technique in this paper uses the principle of cyclically selecting the electrostatic force feedback unit to realize that each feedback capacitor is selected to have the same average number of times, and then the nonlinear error in the feedback conversion process is first-ordered [11]. DWA technology can effectively reduce the nonlinear problems caused by capacitance mismatch caused by process errors and improve system performance. Multi-bit quantization can reduce quantization noise, so there is no need to use higher-order noise shaping structures to reduce stability problems. However, the micromechanical accelerometer is a nonlinear system because the electrostatic feedback force is a nonlinear function of the plate spacing in the micromechanical structure. Therefore, in order to effectively use the multi-bit quantization technology in the micro-machined accelerometer system and apply the electrostatic force feedback linearization technology, the circuit structures of FIG. 3(b) and FIG. 3(c) are used, which increase to some extent. System complexity and power consumption. Figure 3(b), Figure 3(c) 
3 experimental results
The accelerometer interface circuit prototype chip uses a 0.35 μm standard CMOS process for chip verification, as shown in Figure 4. The chip size is approximately 3.5 mm × 4 mm, and is powered by a 5 V voltage. Silicon-aluminum wires are used to connect mechanically sensitive structures and chips to avoid the influence of large parasitic capacitances caused by the metal connection lines. In order to achieve a large signal bandwidth, the system sampling frequency is designed to be 300 kHz, and the overall power consumption of the chip is 25 mW. The main power consumption is concentrated in the pre-stage charge amplifier, integrator circuit, and multi-bit quantization circuit.
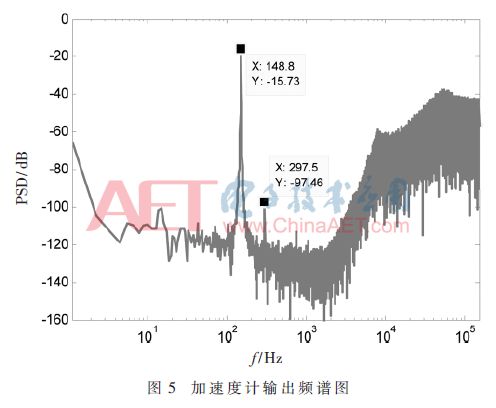
In order to test the dynamic performance of the system, the principle of self-detection is adopted. A 148.8 Hz low-distortion sine signal is input at the feedback end to simulate the external acceleration signal. Using a logic analyzer to collect the system's bitstream output signal, the FFT results for 262 144 points in MATLAB are shown in Figure 5. It can be seen from the spectrum diagram that the noise floor of the system is lower than -120 dB/√Hz. According to the system sensitivity of 0.63 V/g, the equivalent input acceleration noise is calculated to be about 4 μg/√Hz. Limited by the supply voltage and system sensitivity, the system has a range of approximately ±3 g. From the spectrum in Figure 5, it can be seen that the second harmonic of the quantized output of the system is relatively large, reaching -97.46 dB, while the third harmonic is small and almost submerged in the noise floor. It can be seen that the nonlinearity of the system is greatly reduced after multi-bit quantification and electrostatic feedback force linearization techniques, which improves the overall performance. The larger second harmonic in the output may be due to poor layout symmetry and mismatch in the full-bridge balanced circuit in the mechanical structure of the sensor.
4 Conclusion
In this paper, a fourth-order multi-bit quantized micro-mechanical accelerometer interface circuit is designed. The whole circuit is verified by the tapeout experiment. The overall power consumption is 25 mW, the equivalent input acceleration noise is approximately 4 μg/√Hz, and the range is approximately ±3 g. The use of multi-bit quantization and electrostatic force linearization techniques reduces the system's nonlinearity and improves the overall performance of the micromechanical accelerometer. From the test results, we can further improve the performance by improving the symmetry of the layout and the matching of the full-bridge balanced circuit.
Could you share which points you care more when choose a teacher laptop? Size, cpu, storage, memory, battery, screen, fingerprint or backlight? As one of the top laptops for teachers in 2022, this 15.6 inch celeron N5095 or J4125 online teaching laptop is of the special necessary features a laptop for online teaching has. For example, high quality 1080P screen, bigger battery, updated storage and memory, mid-level cpu, etc. So many clients choose this model as laptop for teachers malaysia or laptops for teachers program.
Of course, there are other type Education Laptop, like 14 inch windows 10 64 gb Student Laptop, 15 inch 10th good laptops for university students, 16.1 inch i7 9th hq 4gb video graphic laptop, etc.
If you have other type device interest, just let us know since we also customize android or windows tablet, Mini PC and All In One PC.
Believe always have a right one meeting your special demand, no matter for student project, business tender, academic institution or reselling.
Teacher Laptop,Online Teaching Laptop,Top Laptops For Teachers,Laptop For Teachers Malaysia,Laptops For Teachers Program
Henan Shuyi Electronics Co., Ltd. , https://www.shuyicustomlaptop.com