Foreword
This article refers to the address: http://
The steering performance of the car is one of the main performances of the car. The performance of the steering system directly affects the steering stability of the car. It ensures the safe driving of the vehicle, reduces traffic accidents, protects the driver's personal safety and improves the working conditions of the driver. An important role. How to design the steering system reasonably and make the car have good maneuvering performance is always an important research topic for designers.
In today's high-speed vehicles, non-professional drivers, and intensive traffic, the design of the car's easy-to-maneuver is particularly important for more different levels of driving. The development of Steering – By-Wire System (SBW) is precisely to meet this objective need. It is a new-generation steering system developed after EPS, which has better stability than EPS steering, and it no longer uses mechanical connection between the steering wheel and the steering wheel, completely eliminating the limitations inherent in the traditional steering system. It also improves the safety of the car while bringing convenience to the driver.
First, the development of the line-controlled steering system
Mercedes-Benz Germany began research on front-wheel-steering steering in 1990 and applied its line-controlled steering system to the concept car F400Carving. Koyo Japan has also developed a line-controlled steering system, but in order to ensure the safety of the system, the mechanical part between the steering wheel and the steering wheel is still retained, that is, through the clutch connection, when the wire-controlled steering fails, the clutch is combined to return to the mechanical steering. BMW's concept car, the BMW Z22, uses SteerByWire technology, and the steering wheel's range of rotation is reduced to 160°, which greatly reduces the driver's busyness during emergency steering.
The concept car "FILO" designed and developed by Bertone in Italy, the "C-Crosser" of the Citroen off-road vehicle and the "R129" of the Daimlerchrysler concept car all adopt the line-controlled steering system. In 2003, Honda Japan introduced the Lexus HPX concept car at the New York International Auto Show. The car also uses a line-controlled steering system that integrates various control functions on the instrument panel to achieve automatic vehicle control. It is estimated that after a few years, the mechanical system will be replaced by cables and electronic signals.
Second, the structure and working principle of the wire-controlled steering system
(1) Structure of the wire-controlled steering system
The automobile remote control steering system is mainly composed of a steering wheel module, a front wheel steering module, a main controller (ECU) and an automatic fail-safe system, and its structure is shown in FIG. 1 .

Front wheel steering module
The front wheel steering module includes a front wheel angle sensor, a steering execution motor, a motor controller, and a front wheel steering assembly. Its function is to feedback the measured front wheel angle signal to the main controller, and accept the command of the main controller to control the steering wheel to complete the required front wheel angle to achieve the driver's steering intention.
2. Main controller
The main controller analyzes and processes the collected signals, determines the motion state of the car, sends commands to the steering wheel and the positive torque motor and the steering motor to control the coordination of the two motors. The main controller can also recognize the driver's operation command and determine whether the driver's steering operation is reasonable in the current state. When the car is in an unstable state or the driver gives an error command, the front wheel steer steering system will automatically perform stable control or shield the driver from the wrong steering operation, and automatically drive the vehicle in a reasonable manner to restore the car to a stable state as soon as possible. .
3. Steering wheel module
The steering wheel module includes a steering wheel assembly, a steering wheel angle sensor, a torque sensor, and a steering wheel returning positive torque motor. Its main function is to convert the driver's steering intention (by measuring the steering wheel angle) into a digital signal and transmit it to the main controller, while the main controller sends a control signal to the steering wheel to the positive torque motor to generate the steering wheel returning positive torque. To provide the driver with the corresponding road feeling information.
4. Automatic fail-safe system
The fail-safe system is an important module of the steer-by-wire system. It includes a series of monitoring and implementation algorithms to deal with different fault forms and fault levels in order to maximize the normal driving of the car. Wire-steering technology uses rigorous fault detection and processing logic to maximize vehicle safety.
(2) Working principle of the wire-controlled steering system
The working process: after the information from the steering wheel sensor and the current state of various vehicles is sent to the electronic control subsystem, the computer is used to control the information, and then the vehicle steering subsystem is commanded to turn the vehicle.
At the same time, the information given by the steering resistance sensor in the wheel steering subsystem is also transmitted to the components of the steering wheel system that simulate the road feel via the electronic control subsystem. The principle is shown in Figure 2.
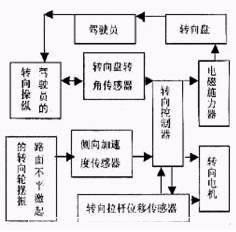
Since the steering wheel and the steering wheel in the steer-by-wire system have no mechanical connection and are disconnected, the necessary information is transmitted through the bus, so the system is also called a flexible steering system.
The first Programmable Logic Controllers were designed and developed by Modicon as a relay re-placer for GM and Landis
These controllers eliminated the need for rewiring and adding additional hardware for each new configuration of logic.
The new system drastically increased the functionality of the controls while reducing the cabinet space that housed the logic.
The first PLC, model 084, was invented by Dick Morley in 1969.The first commercial successful PLC, the 184, was introduced in 1973 which was designed by Michael Greenberg.
Schneide 800 Series I/O Modules
Schneide 800 Series I/O Modules,I/O Modules,Digital I/O Module,I/O Extension Module
Xiamen The Anaswers Trade Co,.LTD , https://www.answersplc.com